
You are looking for information, articles, knowledge about the topic nail salons open on sunday near me 스텝 모터 원리 on Google, you do not find the information you need! Here are the best content compiled and compiled by the Toplist.maxfit.vn team, along with other related topics such as: 스텝 모터 원리 스텝모터 제어방식, 스텝모터 dc모터, 스테핑모터란, 스테핑모터 용도, 스텝모터 드라이버 역할, 스테핑모터 특징, 아두이노 스텝모터, 스텝모터 토크
” 스테핑모터 원리 “는, 스테핑모터에 일정한 간격으로, 순간적으로 전류의 양을 변화시키는 펄스(pulse) 형태의 입력전류(0 ~ 20mA)에 의하여 구동하는 모터이다. 스테핑모터 원리 는 펄스(pulse)가 입력될 때마다, 일정한 각도씩 모터가 회전하도록 제어(control)된다.
스테핑모터 원리 : 네이버 블로그
- Article author: blog.naver.com
- Reviews from users: 10913
 Ratings
Ratings - Top rated: 4.3
- Lowest rated: 1
- Summary of article content: Articles about 스테핑모터 원리 : 네이버 블로그 Updating …
- Most searched keywords: Whether you are looking for 스테핑모터 원리 : 네이버 블로그 Updating
- Table of Contents:
블로그
악성코드가 포함되어 있는 파일입니다
작성자 이외의 방문자에게는 이용이 제한되었습니다

:: Motion Control¿¡ ¿À½Å°ÍÀ» ȯ¿µÇÕ´Ï´Ù ::¸ð¼ÇÄÁÆ®·Ñ
- Article author: www.motioncontrol.co.kr
- Reviews from users: 37399 Ratings
- Top rated: 4.8
- Lowest rated: 1
- Summary of article content: Articles about :: Motion Control¿¡ ¿À½Å°ÍÀ» ȯ¿µÇÕ´Ï´Ù ::¸ð¼ÇÄÁÆ®·Ñ Stepping Motor는 1920년 영국에서 개발된 고정밀도의 위치결정이 가능한 Motor다. 또한 톱니바퀴와 같은 돌기(소치)가 있는 Stator와 Rotor를 갖고, Stator의 코일에 … …
- Most searched keywords: Whether you are looking for :: Motion Control¿¡ ¿À½Å°ÍÀ» ȯ¿µÇÕ´Ï´Ù ::¸ð¼ÇÄÁÆ®·Ñ Stepping Motor는 1920년 영국에서 개발된 고정밀도의 위치결정이 가능한 Motor다. 또한 톱니바퀴와 같은 돌기(소치)가 있는 Stator와 Rotor를 갖고, Stator의 코일에 …
- Table of Contents:
라즈이노 iOT :: 【 아두이노 기초 】 #31 스텝(Step Motor)모터의 이해
- Article author: rasino.tistory.com
- Reviews from users: 43439 Ratings
- Top rated: 4.8
- Lowest rated: 1
- Summary of article content: Articles about 라즈이노 iOT :: 【 아두이노 기초 】 #31 스텝(Step Motor)모터의 이해 DC 모터와 달리 스텝모터는 전자석의 기능을 이용하여 로터(모터 회전축)를 돌리는 구조다. 아래 이미지에서 4번 코일에 전류를 흘리면 S극의 성질을 띄게 … …
- Most searched keywords: Whether you are looking for 라즈이노 iOT :: 【 아두이노 기초 】 #31 스텝(Step Motor)모터의 이해 DC 모터와 달리 스텝모터는 전자석의 기능을 이용하여 로터(모터 회전축)를 돌리는 구조다. 아래 이미지에서 4번 코일에 전류를 흘리면 S극의 성질을 띄게 … 【 아두이노 기초 】 #31 스텝(Step Motor)모터의 이해 이번 시간부터는 스텝 모터를 제어해 보도록 하자. 먼저 스텝 모터를 잘 이해하는 것이 필요 한데, 처음에는 구조나 개념 이해가 어려울 수 있겠..
- Table of Contents:
【 아두이노 기초 】 #31 스텝(Step Motor)모터의 이해
티스토리툴바

ì¤í í¼ëª¨í° Stepper Motor
- Article author: kr.omega.com
- Reviews from users: 11815 Ratings
- Top rated: 5.0
- Lowest rated: 1
- Summary of article content: Articles about ì¤í í¼ëª¨í° Stepper Motor 스테퍼모터 원리 … 스텝 모터는 저비용, 높은 신뢰성, 낮은 속도에서의 높은 회전력 그리고 단순하고 견고한 구조로 인하여 산업용 및 상업용 적용분야에서 매일 … …
- Most searched keywords: Whether you are looking for ì¤í í¼ëª¨í° Stepper Motor 스테퍼모터 원리 … 스텝 모터는 저비용, 높은 신뢰성, 낮은 속도에서의 높은 회전력 그리고 단순하고 견고한 구조로 인하여 산업용 및 상업용 적용분야에서 매일 … ì¤í í¼ëª¨í°, ì¤í í¼ ëª¨í°, ì¤í 모í°, stepper motor, 리ëì´ëª¨í°, ê³µì ìëí, ì°ì ìëíA stepper motor is a brushless, synchronous electric motor that converts digital pulses into mechanical shaft rotation.
- Table of Contents:
ì¤í í¼ëª¨í° ì리
ì¤í í¼ëª¨í° ì¢ ë¥
Step Motor Step Motor의 개요 Step Motor의 원리 3. Step Motor의 특징 – ppt download
- Article author: slidesplayer.org
- Reviews from users: 26608 Ratings
- Top rated: 4.9
- Lowest rated: 1
- Summary of article content: Articles about Step Motor Step Motor의 개요 Step Motor의 원리 3. Step Motor의 특징 – ppt download 1. Step Motor의 개요 Stepping motor, Step motor, Pulse motor AC servo, DC servo motor에 비해 가격이 저렴 정확한 각도(위치) 제어에 용이 shaft의 위치를 검출 … …
- Most searched keywords: Whether you are looking for Step Motor Step Motor의 개요 Step Motor의 원리 3. Step Motor의 특징 – ppt download 1. Step Motor의 개요 Stepping motor, Step motor, Pulse motor AC servo, DC servo motor에 비해 가격이 저렴 정확한 각도(위치) 제어에 용이 shaft의 위치를 검출 … 1. Step Motor의 개요 Stepping motor, Step motor, Pulse motor AC servo, DC servo motor에 비해 가격이 저렴 정확한 각도(위치) 제어에 용이 shaft의 위치를 검출 장치 불필요 각종 OA, FA 장비에 널리 사용 고정밀 위치제어용으로 DC servo motor와 같이 사용 입력 pulse 신호에 대응한 회전 속도 발생 Micro processor에 의한 digital 제어가 용이 속도 제어 용이 DC motor나 AC motor와 달리 shaft의 위치를 검출하기 위한 별도의 feedback(센서 등의 신호)없이 정해진 각도를 회전하고, 상당히 높은 정확도로 정지 가능 다른 motor에 비해 매우 큰 유지 토크(정지 토크) 존재Step Motor Step Motor의 개요 Step Motor의 원리 3. Step Motor의 특징
- Table of Contents:
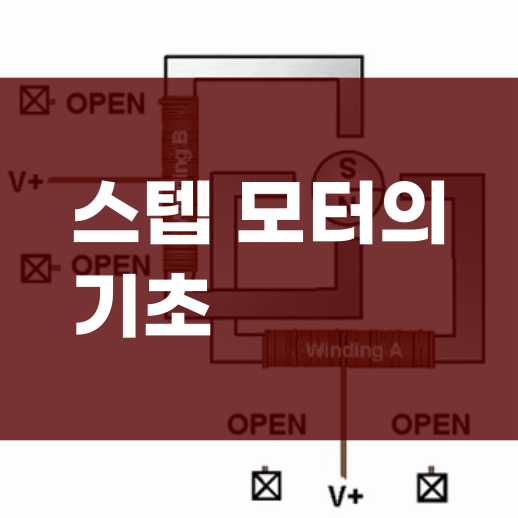
스텝 모터의 기초
- Article author: dream-hacker.tistory.com
- Reviews from users: 13468 Ratings
- Top rated: 3.6
- Lowest rated: 1
- Summary of article content: Articles about 스텝 모터의 기초 1. 기본 구동원리 가장 기본적인 스텝 모터(Stepper Motor)의 구동원리는 아래 그림과 같습니다. 고정자 각 극에 교대로 전류를 흘려(여자 시켜서), … …
- Most searched keywords: Whether you are looking for 스텝 모터의 기초 1. 기본 구동원리 가장 기본적인 스텝 모터(Stepper Motor)의 구동원리는 아래 그림과 같습니다. 고정자 각 극에 교대로 전류를 흘려(여자 시켜서), … 1. 기본 구동원리 가장 기본적인 스텝 모터(Stepper Motor)의 구동원리는 아래 그림과 같습니다. 고정자 각 극에 교대로 전류를 흘려(여자 시켜서), 회전자를 회전하는 방법입니다. 2. 결선방법에 따른 종류 스..
- Table of Contents:
태그
관련글
댓글0
공지사항
최근글
인기글
최근댓글
태그
전체 방문자
스텝 모터 원리
- Article author: mc-t.co.kr
- Reviews from users: 10776 Ratings
- Top rated: 4.4
- Lowest rated: 1
- Summary of article content: Articles about 스텝 모터 원리 모터의 동작이 스텝으로 동작하기 때문에 스테퍼 모터라 호칭됨. 권선코일에 전류를 흘려 여자(자기화)시킨 펄스 수에 따라 일정 각도로 움직이는 … …
- Most searched keywords: Whether you are looking for 스텝 모터 원리 모터의 동작이 스텝으로 동작하기 때문에 스테퍼 모터라 호칭됨. 권선코일에 전류를 흘려 여자(자기화)시킨 펄스 수에 따라 일정 각도로 움직이는 …
- Table of Contents:
스테핑모터 원리 이해 동영상
- Article author: smart-factory-plc.tistory.com
- Reviews from users: 24975 Ratings
- Top rated: 3.1
- Lowest rated: 1
- Summary of article content: Articles about 스테핑모터 원리 이해 동영상 스테핑모터 원리 이해 동영상. New life 2018. 10. 28. 23:47. 반응형 … 태그목록. 글뷰관련 태그목록. 스테핑 모터. 블로그 정보. For maintenance. …
- Most searched keywords: Whether you are looking for 스테핑모터 원리 이해 동영상 스테핑모터 원리 이해 동영상. New life 2018. 10. 28. 23:47. 반응형 … 태그목록. 글뷰관련 태그목록. 스테핑 모터. 블로그 정보. For maintenance.
- Table of Contents:
태그
‘기타’ Related Articles
티스토리툴바
See more articles in the same category here: toplist.maxfit.vn/blog.
스테핑모터 원리
스테핑모터 원리는 스테핑모터를 사용 용도에 적합하게 잘 사용하기 위해서, 꼭 알아야 합니다. ” 스테핑모터 원리 “는, 스테핑모터에 일정한 간격으로, 순간적으로 전류의 양을 변화시키는 펄스(pulse) 형태의 입력전류(0 ~ 20mA)에 의하여 구동하는 모터이다.
스테핑모터 원리 는 펄스(pulse)가 입력될 때마다, 일정한 각도씩 모터가 회전하도록 제어(control)된다. 이때 회전각은 스텝각이라고 부른다. [스테핑모터 원리] 에서 알아야 할 점은 스텝각(degree of step)을 작게하면, 모터의 위치를 결정하는 정밀도를 향상시킬수 있다.
또, [스테핑모터 원리]에서 알아야 할 점은 펄스 속도이다. 펄스 속도를 빠르게 하면 입력하면 스테핑모터의 회전속도가 빨라진다.
– PWM 제어에 의한 Pulse 속도
스테핑모터의 구동 원리는 스테핑모터(Stepping motor)와 콘트롤러에서 받은 펄스 신호로 스테핑모터의 상을 여자해주는 구동 드라이버(Stepping Motor Drive) 그리고 펄스(Pluse)를 발생시켜 펄스를 드라이버에 전달하여 수행게 하는 컨트롤러이 세가지가 있어야 된다.
– 스테핑모터 드라이버
“스테핑모터 원리” 에서 또하나 중요한 것은 스테핑모터 모션컨트롤러(Motion controller)입니다. 단순하게는 펄스만 발생시켜 드라이버에 지령을 내려 스테핑모터가 회전하게 하는 펄스발생기(pulse generator)라고도 불리우는 컨트롤러가 있으나, 최근의 추세는 제어 기술의 고도로 발전함에 따라, 어떤 특정동작을 수행하게 프로그램을 짜서 지령을 내리는 프로그램머블 펄스발생기(programmable pulse generator)의 컨트롤러가 대세입니다. ‘스테핑모터 원리’ 에서 프로그래머블 펄스발생기라는 용어는 더 이상 사용을 안하고, 보통 RS232나 485통신이 가능한 기능을 탑제하여 통칭 모션컨트롤러라고 합니다.
– 1축 모션컨트롤러
” 스테핑모터 원리 ” 에서 펄스 모양의 전압에 의해 일정 각도 회전하는 전동기. 회전 각도는 입력 펄스 신호의 수에 비례하고, 회전 속도는 입력 펄스 신호의 주파수에 비례하는 것이 특징입니다. 스테핑모터 원리 에서 펄스 수와 펄스 속도는 혼동이 되지만 매우 중요하니, 잘 이해하여야 합니다. 이것은 스테핑모터 원리 에서, 스테핑모터의 위치제어와 속도 제어에 아주 중요한 개념이기 때문입니다. 그림은 1상 여자(勵磁)의 3상 방식 스테핑모터인데, 이 밖에 다상 방식의 것이 있습니다.
스테핑모터 원리 에서 스테핑 모터의 기본 구조는, 회전축에 부착된 자석(로터), 그 바깥쪽에 고정된 전자석 (스테타)로 구성된다. 스테타(stator)에 감겨있는 코일에 펄스전류를 흘리면, 자력이 발생하고, N극이 S극을 S극이 N극의 로터를 끌어당길 수 것을 반복하여 스테핑모터가 회전한다. [스테핑모터 원리] 에서 알아야 할 또 하나의 중용한 것은, 스테핑 모터는, 다른 모터에 비해 구조가 간단하고 수명이 매우 긴 장수명의 모터입니다. ” 스테핑모터 원리 ” 에서 스테핑모터의 장점이 많이 있지만, 스테핑모터는, 시스템 유지.관리 비용이 저렴하고, 피드백 제어가 불필요하고, 디지털 제어회로에 적합하다. 한편, 고속 회전이 곤란하고, 소비 전력이 비교적 큽니다. 펄스에 동기시켜, 동작하는 동기전동기 이므로, 다른 이른으로 펄스모터 (Pulse Motor)라고도 부릅니다.
1) 고정자 자계의 회전 반대방향으로 돌고 있는것이 6극 회전자로 밝혀졌는데, 똑같은 고정자 내부에 있는 2극 회전자도 같은 방향으로 회전한다.
2) 위 그림은 1/2 스텝조정을 기본으로 한것으로, 모터 권선을 1과 2로 감은것이다.
3) 6극 회전자가 한번 회전하는데의 콘트롤 시스템의 완벽한 3사이클을 나타낸다. 2극 회전자의 컨트롤 시스템의 주기에 따라, Full회전을 한다.
[스테핑모터 원리] 에서 알아보고 있는 스테핑모터의 용도는 매우 다양합니다.(용도)
1. 카드리더기.
2. 반도체 이송장치
3. ATM, 지폐계수기등 은행기기
4. 우편분류장치
5. 농산물 분류 시스템
6. 산업용 로보트 : 수직 다관절 로봇, 수평 다관절 로봇, 직교로봇, 용접로봇
7. 컴퓨터 : 컴퓨터 디스크 장치등의 헤드 이동용 트래킹 모터. CD롬 로딩용
8. 일반가정용 : CCTV, 경보, 보안장치
9. 항공기 : 항공기조정 비행 제어 시스템의 일종, 조향장치
10. 자동차 : 계기판, 정속주행 장치, 조향장치, 연료분사노줄
11. 게임기 슬러트 머신 : 회전축을 지정한 각도에서 정지시키는 것이 가능한 것으로 빠징꼬 스러트 머신의 릴(Reel)에 사용
12. 각종 로봇 : 서비스로봇, 라인트레이서, 주행로봇, 마이크로로봇, 로봇팔, 무인잠수로봇
13. 의료기기
14. 계측장비
15. 검안기
스테핑모터 원리 에서 알아보고 있는 스테핑모터는 HB(Hybrid) 타입의 고정밀의 위치결정이 가능한 모터이다. 입력펄스에 동기화하여, 스텝모양으로 일정한 각도씩 회전한다. ‘스테핑모터 원리’ 의 스테핑 모터는, 입력펄스에 대해 정확하게 추종하여 회전하기 때문에, 회전량의 검출이 필요없는 고정밀위치 제어가 가능하다. 지금 스테핑모터 원리 에서 알아보고 있는 스테핑모터의 종류는 PM. HB, VR타입중 복합형
HB(하이브리드) 타입 스테핑모터를 알아보고 있습니다. HB타입에는 1스텝 (1펄스) = 1.8도(2상 스테핑모터), 0.72도(5상 스테핑모터), 0.36도(3상 스테핑모터) 스텝각의 스테핑모터가 가장 많이 사용되고있습니다.
스테핑모터 원리 에서 알아보고 있는 스테핑모터의 특징들은 다음과 같다.
(스테핑모터의 특징)
1. 간단한 개회로(Open loop)에서의 고정밀의 위치를 제어가 가능하다.
2. 기동, 정지의 특성과 응답성이 우월하다.
3. 정지시의 각도오차는 누적되지 않는다. (일반적으로 스테핑 모터의 오차는 +0.05도로 고정도이다)
4. 정지상태에서 큰 자기유지력(Holding torque)을 갖는다.
5. 저속시에는 높은 Torque를 갖는다.
6. 모터의 구조가 간단해서, 유지관리가 간단하다.
스테핑모터 원리 에서 알아보고 있는 스테핑모터의 특징들은 다음과 같다.
(스테핑모터의 스텝각)
스테핑 모터에서 모터 드라이버에 1펄스가 입력되었을 때에 모터가 움직이는 각도이다.
펄스수에서 회전량, 펄스 주파수에서 회전속도를 지정한다.
예) 스텝각 0.72도의 경우 Carrier를 50mm 이동시키기 위해 필요한 펄스수는?
1. 모터가 90도 회전하기 위해 필요한 펄스수 : 90/0.72 = 125
2. 펄스 모터 1회전 (360도)에 필요한 펄스수 : 125 x 4 = 500펄스
3. 1회전에서 Carrier가 10mm 이동한다고 가정하면 : 50mm/10mm =5회전
4. 필요한 이동 펄스수 = 500펄스 x 5회전 = 2500펄스
스테핑모터 원리 에서 알아보고 있는 스테핑모터의 특징들은 다음과 같다.
(스테핑모터 회전속도)
스테핑모터의 회전속도는 펄스신호의 속도에 정확히 비례한다. 회전속도와 펄스신호의 속도의 관계는,
이하의 공식에서 구한다. 펄스수에서 회전량, 펄스주파수에서 회전속도를 지정한다.
모터 회전속도 (r/Min) = 스텝각 (。 ) / 360。 x 펄스속도 (주파스 : Hz) x 60
예 ) 스텝각 = 0.72 도 , 펄스속도 = 100Hz의 경우에 모터속도
모터의 회전속도 (r/min) = 0.72 / 360 x 1000 x 60 = 120 (r/min)
여기까지 스테핑모터 원리 에 대해서 알아 봤습니다. 정리하여 보면, 스테핑모터 원리는 일반 DC모터와는
달리 스테핑모터에 스테핑모터 컨트롤러에서 펄스 신호를 받아 스테핑모터 구동 드라이버가 상을 여자해주어
구동하는 것을 알 수 있습니다. 마지막으로, 스테핑모터 원리 에서 다음은 스테핑모터를 스테핑모터드라이버와
스테핑모터 컨트롤러로 구동 테스트하는 것입니다.
스테퍼모터 Stepper Motor
스테퍼 모터 Stepper Motor 스테퍼모터 원리
스테퍼 모터의 장점
모터의 회전각이 입력 펄스에 비례
모터는 정지 시 최대 회전력을 가짐(권선이 가압상태인 경우)
양호한 스테퍼 모터는 단계 별 3에서 5%의 정확도를 가지고 이러한 오류율은 한 단계에서 다음 단계로 나아갈 때 누적되지 않으므로 정밀한 위치선정 및 움직임의 반복성을 가짐
시작/정지/역회전에 대한 뛰어난 반응
모터에 접촉성 브러시가 없으므로 신뢰성이 높아 스텝 모터의 수명이 단순하게 베어링의 수명에 의존함
디지털 펄스에 대한 스테퍼 모터의 입력이 오픈-루프 제어를 제공하여 모터 관리를 더 간편하게 하고 비용이 덜 들게 함
축에 직접 연결되는 부하로 매우 낮은 속도의 동기식 회전을 얻을 수 있음
속도가 입력 펄스의 주파수에 비례하므로 다양한 범위의 회전 속도를 실현할 수 있음
스텝 모터의 유형
스텝 방식 Step Modes
TM
스테퍼 모터 드라이버 Driver
인덱서 Indexer
독립 작동 Stand-Alone Operation
다축 제어 Multi-Axis Control
스테퍼 모터와 드라이브의 선택
스테퍼 모터는 디지털 펄스를 기계식 축 회전(mechanical shaft rotation)으로 전환하는 브러시 없는 동기식 전기 모터입니다.스테퍼 모터에 있어서 모든 회전은 별개의 단계, 많게는 200단계로 나뉘며 모터는 각 단계 별로 별도의 펄스로 보내져야 합니다. 스테퍼 모터는 한 번에 한 단계만 취할 수 있으며 각 단계는 같은 크기를 가집니다. 각 펄스가 모터가 정밀 각도, 보통 1.8°로 회전하도록 하기 때문에 모터의 위치는 피드백 메커니즘이 없이도 제어 가능합니다. 디지털 펄스의 주파수가 증가하면 단계의 움직임은 지속적인 회전으로 변화하고 회전의 속도는 펄스의 주파수에 직접적으로 비례합니다. 스텝 모터는 저비용, 높은 신뢰성, 낮은 속도에서의 높은 회전력 그리고 단순하고 견고한 구조로 인하여 산업용 및 상업용 적용분야에서 매일 사용되고 있습니다.비선형 입력 신호를 선형 linear 출력 신호로 전환합니다. 이는 써모커플 신호에서는 일반적입니다.스텝 모터는 가변 자기저항, 영구자석 그리고 하이브리드 이렇게 세 가지 기본 유형을 가지고 있습니다. 하이브리드 스텝 모터는 가변 자기저항 스텝 모터와 영구자석 스텝 모터가 가진 최고의 특징들을 조합하였기 때문에 여기서는 하이브리드 모터에 집중하도록 하겠습니다. 모터는 여러 개의 톱니를 가진 고정 축과 영구자석 로터로 구성됩니다. 표준 하이브리드 모터는 200개의 로터 톱니를 가지며 1.8º의 스텝 각으로 회전합니다. 높은 정적 및 동적 회전력을 보이고 매우 높은 스텝 비율로 작동하기 때문에 하이브리드 스텝 모터는 컴퓨터 디스크 드라이브, 프린터/플로터 그리고 CD 플레이어와 같은 매우 다양한 상업적 적용분야에서 사용됩니다. 일부 산업용 그리고 연구용 적용분야에서의 스텝 모터는 로봇공학, 기계장비, 픽 앤 플레이스 기계, 자동 전선절단기 및 결속기 그리고 심지어 정밀 유체 제어 장비에서도 사용됩니다.스테퍼 모터의 “스텝 방식”은 풀, 하프 및 마이크로스텝을 포함합니다. 모든 스테퍼 모터의 스텝 방식 출력의 유형은 드라이버의 디자인에 따라 다릅니다. OMEGAMATION은 스테퍼 모터 드라이브에 스위치로 선택할 수 있거나 소프트웨어로 선택할 수 있는 분해능을 갖춘 마이크로스테핑 드라이브뿐만 아니라 스위치로 선택할 수 있는 풀 스텝 방식과 하프 스텝 방식을 제공합니다.표준 하이브리드 스테핑 모터는 200개의 로터 톱니 또는 모터 축의 회전 당 200개의 풀 스텝을 가집니다. 360° 회전을 200스텝으로 나누면 1.8°의 풀 스텝 각도와 같아집니다. 보통 풀 스텝 방식은 전류를 엇갈리게 역전시키는 동안 두 권선 모두에 전원을 공급하면 가능합니다. 기본적으로 드라이버로부터의 디지털 펄스 하나는 한번의 스텝과 동일합니다.하프 스텝은 단순히 스텝 모터가 회전 당 400 스텝으로 회전함을 의미합니다. 이 방식에서는 하나의 권선에 전원이 공급되고 그 이후 두 권선에 번갈아 전원이 공급되어 로터가 풀 스텝 길이의 반 또는 0.9°로 회전하게 합니다. 회전력은 약 30% 줄어들지만 하프 스텝 방식은 풀 스텝 방식보다 더 매끄러운 움직임을 생성합니다.마이크로스테핑은 극 간의 위치의 숫자를 더 세부적으로 나누는 정도로 모터 권선의 전류를 제어하는 상대적으로 새로운 스테퍼 모터 기법입니다. 오메가메이션 마이크로스테핑 드라이브는 풀 스텝(1.8°)을 256개의 마이크로스텝으로 나눌 수 있으며 회전 당 51,200스텝(.007°/스텝)이 발생하게 됩니다. 마이크로스테핑은 보통 다양한 범위의 속도에 걸쳐 정확한 위치선정과 매끄러운 움직임을 필요로 하는 적용분야에서 사용됩니다. 하프 스텝 방식과 마찬가지로 마이크로스테핑은 풀 스텝 방식에 비해서 회전력이 약 30% 정도 줄어듭니다.스테퍼 모터의 로터리 움직임은 연결 나사/웜 기어 드라이브 시스템(lead screw/worm gear drive system)을 사용하여 선형 움직임으로 전환할 수 있습니다(그림 B 참조). 리드 또는 엄지나사의 피치는 나사의 분해능 하나가 이동하는 선형 거리입니다. 리드가 회전 당 1인치와 같다면 분해능 당 200 풀 스텝이 있게 되며 엄지나사 장치의 분해능은 스텝 당 0.005인치가 됩니다. 마이크로스테핑 방식에서 스텝 모터/드라이브 시스템을 사용하면 더 높은 분해능도 가능합니다.스테퍼 모터를 연결하기 위해서는 병렬 또는 직렬의 두 가지 방식이 존재합니다. 병렬 연결은 높은 인덕턴스를 제공하므로 낮은 속도에서 높은 회전력을 보입니다. 직렬 연결은 인덕턴스를 낮추어 빠른 속도에서 회전력이 증가합니다.스테퍼 모터 드라이버는 인덱서 또는 제어 시스템으로부터 스텝과 방향 신호를 받아서 이를 스텝 모터를 작동시키기 위한 전기 신호로 전환합니다. 모터 축의 매 스텝마다 한 번의 펄스가 필요합니다. 풀 스텝 방식에서 표준 200 스텝 모터의 경우 한 번의 회전을 완료하기 위하여 200 스텝 펄스가 필요합니다.회전 속도는 펄스 주파수와 직접적으로 비례합니다. 일부 드라이버는 모터 속도 설정을 위한 외부 아날로그 신호 또는 조이스틱을 사용할 수 있도록 해주는 내장 발진기를 갖추고 있습니다.스텝 모터의 속도와 회전력은 드라이버로부터 모터 권선까지의 전류 흐름에 기반합니다. 흐름을 억제하거나 전류가 권선에 전원을 공급하는 시간을 제한하는 요인은 인턱턴스로 알려져 있습니다. 인턱턴스의 효과는 대부분의 드라이버 회로는 모터의 정격 전압보다 더 많은 양의 전압을 공급하도록 설계되어 있습니다. 드라이버로부터의 출력 전압이 높을수록 회전력 대 속도의 수준이 올라갑니다. 일반적으로 드라이버 출력 전압(버스 전압)은 모터의 전압 등급보다 5에서 20배 더 큰 등급이어야 합니다. 모터를 손상으로부터 보호하기 위하여 스텝 모터 드라이브는 스텝 모터의 전류 등급에 전류 제한적이어야 합니다.인덱서 혹은 컨트롤러는 스텝과 방향 출력을 드라이버에 공급합니다. 대부분의 적용분야에서 인덱서는 가속, 감속 초당 스텝 그리고 거리를 포함하는 기타 제어 기능 또한 관리하여야 합니다. 인덱서는 다른 외부 신호와 상호작용 하고 이를 제어할 수 있습니다.인덱서로의 통신은 RS-232 병렬 포트를 통하여 이루어지며 일부 경우에서는 RS485 포트를 사용합니다. 어떠한 경우에도 인덱서는 호스트 컴퓨터로부터 높은 수준의 명령을 수신하여 필요한 스텝 및 방향 펄스를 드라이브에 보낼 수 있습니다.인덱서는 고, 조그, 홈, 리미트 스위치(Go, Jog, Home, Limit switch)와 같은 외부 신호원으로부터의 입력을 모니터링 하기 위한 보조 입출력을 가집니다. 인덱서는 또한 I/O 출력 핀을 통하여 다른 기기의 기능을 시작하게 할 수도 있습니다.독립 방식에서 인덱서는 호스트 컴퓨터 없이도 작동을 할 수 있습니다. 비휘발성 메모리에 일단 다운로드 되면 모션 프로그램은 키패드 또는 터치스크린과 같은 다양한 유형의 작업자 인터페이스에 의하여 혹은 보조 I/O 입력을 통한 스위치로부터 개시될 수 있습니다. 독립 스테퍼 모터 제어 시스템은 종종 드라이버와 전원 공급 그리고 스톨 감지 및 정확한 모터 위치 보상이 필요한 “폐쇄 루프” 적용분야를 위한 선택적인 인코더 피드백과 함께 제공됩니다.여러 모션 적용분야는 하나 이상의 스테퍼 모터를 제어합니다. 다축 제어 시스템이 가용한 경우 예를 들어, HUB444 작업용 허브는 최대 4대의 스테퍼 드라이브가 연결될 수 있으며 각각의 드라이브는 별도의 스테퍼 모터에 연결됩니다. 네트워크 허브는 원형 또는 선형 보간과 같은 높은 수준의 동기화를 요구하는 조직화된 움직임을 제공합니다.스테퍼 모터의 선택은 해당 적용분야의 회전력과 속도 요구사항에 따라 다릅니다. 원하는 작업을 수행할 수 있는 모터를 고르기 위하여 모터의 회전력-속도 곡선(예를 들어 그림 C와 같이 각 드라이브의 기술시방에 있습니다)을 확인하시기 바랍니다. 오메가 제품라인의 모든 스테퍼 드라이브는 드라이브에 권장되는 모터에 대한 회전력-속도 곡선을 보여줍니다. 회전력 및 속도 요구사항이 여러 대의 스테퍼 모터로 충족 가능한 경우 모션 시스템의 필요, 즉 스텝/방향, 독립형 프로그램, 아날로그 입력, 마이크로스테핑과 같은 요인에 따라 드라이브를 선택하시기 바랍니다. 그런 후에 해당 드라이브용으로 권장되는 모터 중 하나를 선태하시기 바랍니다. 권장되는 모터 목록은 스텝 모터와 드라이브 조합이 최적의 성능을 보장하기 위한 제조사의 광범위한 시험을 기반으로 만들어졌습니다.
Step Motor Step Motor의 개요 Step Motor의 원리 3. Step Motor의 특징
Presentation on theme: “Step Motor Step Motor의 개요 Step Motor의 원리 3. Step Motor의 특징”— Presentation transcript:
1 Step Motor Step Motor의 개요 Step Motor의 원리 3. Step Motor의 특징
2 1. Step Motor의 개요 Stepping motor, Step motor, Pulse motor
AC servo, DC servo motor에 비해 가격이 저렴 정확한 각도(위치) 제어에 용이 shaft의 위치를 검출 장치 불필요 각종 OA, FA 장비에 널리 사용 고정밀 위치제어용으로 DC servo motor와 같이 사용 입력 pulse 신호에 대응한 회전 속도 발생 Micro processor에 의한 digital 제어가 용이 속도 제어 용이 DC motor나 AC motor와 달리 shaft의 위치를 검출하기 위한 별도의 feedback(센서 등의 신호)없이 정해진 각도를 회전하고, 상당히 높은 정확도로 정지 가능 다른 motor에 비해 매우 큰 유지 토크(정지 토크) 존재
3 2. Step Motor의 특징 2-1 장 점 디지털신호로 직접 오픈 루프제어 가능 시스템 전체 Simple
펄스신호의 주파수에 비례한 회전속도 발생 광범위한 속도제어 가능 기동, 정지, 정-역회전, 변속이 용이하며 응답특성 우수 모터의 회전각이 입력 pulse 수에 비례 모터의 속도는 1초간의 입력 pulse 수에 비례 1 step 당 각도 오차가 5% 이내이며 회전각 오차가 step마다 누적되지 않음 정지 시에 높은 유지토크로 위치를 유지 가능, 기동 및 정지 응답성 양호 servo motor로서 사용 가능 초 저속으로 높은 토크(torque) 운전 가능 DC motor등과 같이 brush 교환 등 보수 불필요 모터자체의 부품수가 적어 신뢰성 우수 회전각 검출을 위한 별도의 센서가 불필요 제어계 간단히 구성 가능 가격이 상대적으로 저렴
4 2. Step Motor의 특징 2-2 단 점 특정 주파수에서 진동, 공진 현상 발생 가능 관성이 있는 부하에 취약
고속 운전시에 탈조하기 쉽다. 보통의 driver로 구동 시, 권선의 인덕턴스 영향으로 인하여 권선에 충분한 전류를 흘리게 할 수 없어, pulse비가 상승함에 따른 torque의 저하로 DC motor에 비해 효율이 떨어진다.
5 3. Step Motor의 종류 VR(Variable Reluctance) Type
가변 리럴턴스형 구동회로에서 전류의 극성은 중요치 않다. Unipolar 구동방식 PM(Permanent Magnet) Type 영구 자석형 전류의 극성이 회전방향 결정 Bipolar 구동방식 Hybrid Type 영구 자석형과 가변 리럴턴스형의 복합형
6 3-1 VR형
7 3-2 PM형
8 3-3 Hybrid 형
9 4. Step Motor의 특성 정특성(Static Characteristics) 정지시 특성 각도와 정토크 특성
모터가 특정한 안정위치에 정지하고 있고 정격의 전류로 여자하고 있을 때 모터의 축에 외력을 인가한 경우 인가 토크에 따라서 정지 각도가 변위한다. 이러한 변위 각과 인가 토크와의 관계를 각도와 정토크 특성이라 한다. 모터의 부하 토크가 0 이라면 변위각의 오차는 0이 되고 정확하게 안정위치를 유지한다. 그러나 모터의 부하 토크가 가해지면 인가된 토크에 따라서 정지 각도가 변위한다. 최대 정토크를 Holding Torque라 한다.
10 4. Step Motor의 특성 동 특성(Dynamic Characteristics) 기동 및 회전시 특성
속도가 증가할수록 발생 토크는 감소. Starting 특성 Pull-in Torque 특성 입력 펄스에 동기해서 기동 및 정지를 할 수 있는 범위 자기동 영역( Pull-in range) 관성이 증가하면 자기동 영역은 감소 최대 자기동 주파수(Maximum Starting Frequency) 무부하 상태에서 입력 펄스에 동기해서 기동/정지할 수 있는 최대 주파수 최대 기동 토크(Maximum Starting Torque / Maximum Pull-in Torque) 정격전류로 여자한 경우 10Hz 미만의 입력 펄스에 동기해서 기동할 수 있는 최대 부하 토크 Unstartable range : 공진으로 기동할 수 없는 영역
11 4. Step Motor의 특성 동 특성(Dynamic Characteristics) Slewing 특성
Pull-out Torque 특성 자기동 영역에서 기동 한 후, 입력 펄스의 주파수를 증가함에 따라 이에 동기해서 회전할 수 있는 영역 Maximum Pull-out rate 무부하 상태에서 입력 펄스에 동기해서 회전할 수 있는 최대 주파수
12 5. Step Motor의 여자 방식 NK243 Hybrid 4상 6선 스테핑 모터의 결선 예
6개의 외부 전선을 갖는 스테핑 모터는 Unipolar(단극성)과 Bipolar(양극성) 구동방식(코일의 중간 탭에 연결된 두 선은 사용하지 않음)을 모두 사용 가능 4개의 외부 전선을 갖는 스테핑 모터는 Bipolar 구동방식만 가능 RED BLACK BLUE YELLOW BROWN WHITE
13 5. Step Motor의 여자 방식 등가 회로 VCC VCC GND
14 5. Step Motor의 여자 방식 1상 여자 방식의 구동 특징 항상 하나의 상에만 전류를 흐르게 하는 방식
입력이 1 상 뿐이므로 모터의 온도 상승이 낮고, 전원이 낮아도 된다. 출력토크는 크지만 스텝 했을 때에 감쇠 진동이 큰 난조를 일으키기 쉬우므로 광범위한 스텝 레이트로 회전시킬 때는 주의를 요한다. 1주기
15 C언어에 의한 프로그래밍 8255의 A 포트의 어드레스 번지 280h, B 포트 281h, C 포트 282h, control word 레지스터 283h로 각각 설정 #include
#include #include #define CW 0x283 // 컨트롤 레지스터의 어드레스 #define PA 0x280 // 8255 A port 설정 void main( ) { int i, j , out_data[4]={ 0x01, 0x02, 0x04, 0x08 }; //1상 여자 outportb(CW, 0x80) ; //8255초기화, 전 포트 출력 for(i=0;i<30;i++){ for(j=0;j<4;j++){ outportb(PA, out_data[j]); delay(200); } } } 16 5. Step Motor의 여자 방식 2상 여자 방식 특징 항상 2개의 상에 직류를 흐르게 하는 방식 항상 2 상이 여자되어 있으므로 기동 토크가 주어져 난조가 일어나기 어렵다. 상 전환시에도 반드시 1 상은 여자되어 잇으므로 동작시에 제동 효과 모터의 온도 상승이 있고 1 상 여자에 비해 배의 전원 용량을 필요 1주기 17 C언어에 의한 프로그래밍 #include #include #include
#define CW 0x283 // 컨트롤 레지스터의 어드레스 #define PA 0x280 // 8255 A port 설정 void main( ) { int i, j , out_data[4]={ 0x03, 0x06, 0x0C, 0x09 }; //2상 여자 outportb(CW, 0x80) ; //8255초기화, 전 포트 출력 for(i=0;i<30;i++){ for(j=0;j<4;j++){ outportb(PA, out_data[j]); delay(200); } 18 5. Step Motor의 여자 방식 1-2상 여자 방식 특징 하나의 상과 2개의 상을 교대로 흐르게 하는 방식 1 상, 2 상 여자의 용량을 특징을 가지며 스텝각이 1 상, 2 상에 비교해서 1/2이 된다. 응답 스텝 레이트는 1 상, 2 상 여자의 2배. 1주기 19 C언어에 의한 프로그래밍 #include #include #include
#define CW 0x283 // 컨트롤 레지스터의 어드레스 #define PA 0x280 // 8255 A port 설정 void main( ) { int i, j , out_data[8]={ 0x01, 0x03, 0x02, 0x06, 0x04, 0x0C, 0x08, 0x09 }; //1-2상 여자 outportb(CW, 0x80) ; //8255초기화, 전 포트 출력 for(i=0;i<30;i++){ for(j=0;j<8;j++){ outportb(PA, out_data[j]); delay(200); } 20 6. Step Motor의 구동회로 제어회로 구동회로 스테핑 모터 구동용 펄스 발생 마이크로 프로세서 제어회로에 의해 출력된 구동신호에 의해 모터 구동 전류 발생 Unipolar방식 권선 전류는 한 방향 Bipolar방식 양 방향의 권선 전류 발생 제어회로 구동회로 전원 Step Motor 21 6. Step Motor 구동회로 Unipolar Drive Circuit 단극성 구동방식 전류의 극성이 중요하지 않는 VR type 용 권선의 전류는 한 방향만 가능 VCC 22 6. Step Motor 구동회로 Practical Circuit 수 A 용 SK3180 Darlington Tr, 전류이득 = 1000 7407 : high-voltage open collector driver(10mA sink) 20A 용 IRC IRL540 FET 0.5A 용 ULN2003 → 7개 Darlington Tr Array 23 6. Step Motor 구동회로 Practical Circuit SLA 7024/26M 3A용 정전류 구동 IC, Unipolar drive에 적합 24 SLA7024/26의 내부 블럭도 25 SLA7024/26의 내부 회로도 26 SLA7024/26 이용 모터 드라이버 회로 예 27 CONTROL단자는 연결을 하지 않으며, PIN13, PIN14는 반드시 접지 시켜야 된다 CONTROL단자는 연결을 하지 않으며, PIN13, PIN14는 반드시 접지 시켜야 된다. RS에 사용되는 저항은 메탈저항으로 1-2W짜리를 사용해야 하며 만일 SLA7026을 쓰게 될 때에는 0.68Ω을 사용하면 된다. 그리고 만일 여러분이 두 개의 모터를 같은 토크로 동시에 돌리려고 한다면 단지 r2를 공통으로 사용하면 되고 저항은 500Ω(VR)로 바꾸기만 하면 된다. 그리고 자기가 원하는 토크는 가변저항을 적당히 조절하면 토크를 조절할 수 있다. 이 가변저항을 조절함으로써 모터에 최대 1.4A(SAL7026 3A)까지 공급 가능하다. 여기에 대한 계산식은 이 글의 끝부분에 다루겠다. 만약 여러 개의 모터를 간단히 구동하기 위한 방법을 원한다면 간단한 방법이 있다. 바로 PAL(PROGRAMMABLE ARRAY LOGIC)을 사용하는 것이다. PAL을 사용하면 L297을 사용하지 않아도 사용할 수 있다. 그림 3에서 보여주는 사용한 IC는 GAL 22V10으로 L297 두 개의 효과를 낼 수 있고 비용도 훨씬 저렴하다. 28 6. Step Motor 구동회로 Bipolar Drive Circuit 양극성 구동방식 전류의 극성이 중요한 PM/Hybrid type. 코일의 전류는 양 방향 가능. 코일의 이용률이 높고 저속에서 더 큰 토크 가능. 에너지 회생 가능. (1kW 이상의 모든 Step motor에 채용됨.) T1, T2와 T3, T4가 동시에 스위칭. D1~D4는 스위치 off시 전류의 freewheeling path 제공 이 때 에너지가 전원으로 회생 스위치 off시 다이오드를 통해 전원전압이 역으로 인가되므로 전류가 빠르게 감소 29 6. Step Motor 구동회로 Unipolar(단극성)과 Bipolar(양극성) 구동방식(코일의 중간 탭에 연결된 두선은 사용하지 않음)을 모두 사용할 수 있는 스테핑 모터는 6선의 외부 전선을 가지며 Bipolar 구동방식만 사용할 수 있는 모터는 4선의 외부 전선을 갖는다. VCC 1 3 2 4 Unipolar Bipolar 30 6. Step Motor 구동회로 Practical Circuit UDN 2998W 2상 bipolar drive L297 +L298 drive logic(2A용) L297 4상 구동 신호 발생 IC 정전류 구동 전용 Controller Half/Full Step 가능 L298 Dual Full Bridge Driver 최대 46V/2A까지 사용 가능 31 L297의 주요 핀 설명 L297의 장점 SYNC GND : 그라운드(접지) HOME A, B, C, D 회로가 간단하고 크기가 작으며 평균 200에서 250mA 정도의 적은 소모전류와 2000에서 4000pps 이상의 고속구동이 가능 SYNC 여러 개의 L297을 사용할 될 때 서로 동기시키기 위하여 사용. GND : 그라운드(접지) HOME Open Collector 타입의 출력을 내며 L297이 초기상태(ABCD가 0101) A, B, C, D 2상 모터에 쓰이는 모터의 A, B, C, D상 신호로, 스테핑 모터 전선과 연결 32 L297의 주요 핀 설명 INH1 INH2 ENABLE CONTROL Vs : 5V DC A상과 B상과의 OR 신호 발생 C상과 D상과의 OR 신호발생. ENABLE 칩 활성화(Chip enable) 입력 신호 신호가 Low이면 INH1, INH2, A, B, C, D가 모두 Low가 되어, 동작하지 않음 CONTROL 모터의 드라이브 방법을 결정. 이 입력이 Low 일 때 Chopper는 INH1, INH2에서 동작 High일 때 Chopper가 A, B, C, D의 phase line에서 동작. Vs : 5V DC 33 L297의 주요 핀 설명 SENS2 SENS1 Vref OSC C, D 상의 모터의 전원으로부터 Load 전류감지 전압을 입력. SENS1 A, B 상의 모터의 전원으로부터 Load 전류감지 전압을 입력 Vref 정전류 회로의 기준 전압을 결정 OSC 연결된 RC 공진회로가 L297 내부의 chopper rate를 결정 Chopper rate는 5-20KHz 정도로 스위칭 주파수 로 결정 이때 저항 값은 10KOhm 보다 큰 저항을 사용 34 L297의 주요 핀 설명 CW/ CCW CLK HALF/FULL RESET : 시스템 초기화.(ABC = 0101) Clock Wise/ Counter Clock Wise는 모터의 회전방향을 제어할 수 있는 입력 핀. CLK 모터의 속도를 제어할 수 있는 입력 핀. HALF/FULL Half step CLK으로 들어오는 펄스를 반만 이용. 펄스 두 개가 들어와야 모터의 한 스텝이 돌아간다. Full step CLK로 들어오는 펄스를 모두 사용 RESET : 시스템 초기화.(ABC = 0101) 35 상순서 발생 Full step 모터가 한 번 돌아가는데 오랫동안 ON 모터에 전류가 흐를 수 있는 시간이 길어지므로 모터의 속도는 낮지만 큰 토크 발생. one-phase-on A,B,C,D상중에서 항상 한 단자만 ON 모터에 흐를 수 있는 전류의 시간이 적어진다 two-phase-on A, B, C, D상 중에서 항상 두 단자가 ON 열이 많이 발생 36 L297의 내부 블록도 <그림 1)> L297의 내부구조 37 Full-Bridge Driver IC L298
38 L298의 내부구조 바이폴라 구동을 위한 2조의 H bridge driver를 포함
L297에서 만든 A, B, C, D상과 INH1, INH2로 동작 8, 9번 핀에 5V 전원을 연결 4번 핀에는 모터 구동 전압 인가 46V까지 가능
39 A조 B조 설명 input1(5), input2(7) input3(10), input4(12) 모터의 방향을 결정한다. output1(2), output2(3) output3(13), output4(14) 모터의 양단자에 연결한다. enable A(6) enable B(11) 모터의 on/off 역할 입력이 H일 때 on, L일 때 off. current sensing A(1) current sensing B(15) 0.5옴의 저항을 통해 GND로 연결. 정격전력이 높은 저항을 사용해야 한다.
40 L298 H 브리지 구동 예 HALF Step AB=10, INH1=1 전류는 Q1, 권선, Q4를 통해 Rs로 흐른다.
다음 순간(AB=00, INH1=0)에 INH1에 의해 모든 트랜지스터가 off 모터의 권선에 축적된 전류는 다이오드 D4, 권선, D1를 통해 feedback 이 시간 동안 코일에 남아 있는 에너지는 다이오드를 통해 되돌린다. 스위칭 소자의 파괴를 막기 위해 freewheeling diode 사용. 다이오드는 빠른 전류 회복을 위해 fast recovery형 사용
41 L298 H 브리지 구동 예 Full Step의 1-phase-on 2-phase-on AB=10, INH1=1
Half 스텝의 경우와 같이 Q1을 권선 Q4를 통해 전류가 흐른다. 그러나 다음 순간 (AB=00, INH1=0)에 INH가 ‘LOW’가 되어 모든 TR은 off. 이 시간 동안 프리휠링 다이오드를 통해 모터의 권선에 저장된 에너지가 되돌려진다. 하지만 Half 스텝은 Full(1-phase-on)보다 2펄스당 1스텝 움직이므로 토크는 좋은 반면 속도는 느리다. 2-phase-on INH의 변화가 없으므로 다음 스텝이 들어와도 코일에 남아 있는 에너지를 되돌릴 시간적 여유가 충분하지 않다. 즉, 모터에 흐르는 전류가 많아 열이 많이 발생
42 L298의 SENSA와 B에 연결되어 저항 계산 모터에 최대로 흘리고 싶은 전류와 배터리의 전압 그리고 모터 내부의 권선 저항을 이용하여 계산. L298의 내부 브리지 회로에서 트랜지스터 하나에 소모되는 전압이 약 0.7V이고 권선을 통한 전류가 저항 Rs에 흐르려면 트랜지스터를 두 개를 거치므로, 1.4V가 소모되고 배터리 전압을 12V(스텝모터는 모터 정격전압에 5배를 흘려줄 때 최적의 동작을 한다. 여기에 사용한 모터는 정격 4V), 권선 저항을 4.3Ω, 흘리고 싶은 전류를 1.5A라고 하면 이 회로를 분석하면 라는 식이 성립된다. 여기서 Rs=2.7Ω이 되고 이 저항에 흐르는 전력은 가 된다. 그래서 저항을 근사치로 5W/2Ω을 사용하였다. 그리고 10㏀ 가변저항은 기준전압(Reference 전압)을 조정하기 위해 사용된다.
43 사용 예
44 L297과 L298 사용 예
45 스테핑 모터의 제어 블럭도 제어장치 펄스발생기 구동회로 모터의 회전방향과 회전속도 등을 제어 제어장치의 신호로 펄스를 발생
발생된 펄스를 각 권선에 순차적으로 분해하고, 전력을 제어
46 펄스 발생기 Timer IC인 NE555를 이용한 예 발진 주파수 주기 T
가변저항 를 조정하여 약 150[Hz]에서 3[kHz]까지 펄스 출력가능 주기 T
47 여자 신호 발생 스테핑 모터 각 상을 여자 하기 위해 구동회로에 보내야 하는 제어신호 전용 IC인 PMM8713 이용
1. CU – CW 여자신호발생 2. CD -CCW 여자신호 3. Ck – 클럭 펄스 입력 4. U/D – ‘L’일 때, CCW – ‘H’일 때, CW 여자신호 출력 5. EA – 여자모드 변환 6. EB – 여자모드 변환 /4상 전환 8. Vss – GND 9. R – reset 10.~13. 여자신호 출력 14. EM – 여자 모니터 15. C0 – 입력 펄스 모니터 16. VDD – +4~18[V] 전원
48 회전방향 변환 3번 핀과 4번 핀을 접지한 후, 1번 핀과 2번 핀을 접지하고, 3번 핀에 클럭 펄스를 가한 후,
1번 핀에 클럭 펄스를 가하면 CW(ClockWise)신호 출력 2번 핀에 클럭 펄스를 가하면 CCW(Counter ClockWise)신호 출력 1번 핀과 2번 핀을 접지하고, 3번 핀에 클럭 펄스를 가한 후, 4번 핀에 ‘H’를 가하면 CW신호 출력 4번 핀에 ‘L’를 가하면 CCW신호 출력
49 여자 모드 변환 1상, 2상, 1-2상 여자의 종류를 선택 의 논리에 따라 여자 방법 변환
50 구동회로 4상 스테핑 모터의 2상 여자 방식에 의한 제어 회로
51 쉬프트레지스터를 이용한 스텝모터 구동회로 4bit 쌍방향 Shift Registor 74194를 사용한 4상 모터의 2상 여자 회로
52 74LS194 핀번호 및 Mode
53 출력 패턴 S1H DSLH S0H DSRH
54 동작 설명 2상 여자 1상 여자 1-2상 여자 전원 on시에 콘덴서 10 uF로 충전
S0 , S1 “H“ 로 되고, “H” 일 때 약간 뒤진 클럭에 의해 A – D 의 입력 데이터가 내부 플립 플롭에 세트 쌍방향 쉬프트 레지스터 74194의 QA를 SL에 QD를 SR에 접속 펄스가 들어갈 때마다 2 비트의 “H“ 데이터는 오른쪽이나 왼쪽으로 (CW 나 CCW) 쉬프트 1상 여자 74194의 A입력 Vcc B,C,D 입력 GND 1-2상 여자 8비트 쌍방향 쉬프트 레지스터 74198을 사용
55 2SC1815 Data Sheet TOSHIBA 저주파 증폭용 Bottom View
56 2SD633 Data Sheet
57 TIP31, 31A, 31B, 31C(NPN) TIP32, 32A, 32B, 32C(PNP)
58 TIP120/121/122 Data Sheet
So you have finished reading the 스텝 모터 원리 topic article, if you find this article useful, please share it. Thank you very much. See more: 스텝모터 제어방식, 스텝모터 dc모터, 스테핑모터란, 스테핑모터 용도, 스텝모터 드라이버 역할, 스테핑모터 특징, 아두이노 스텝모터, 스텝모터 토크